فاصلهسنجی در بینایی ماشین
فاصلهسنجی یا عمقسنجی مقولهای پراهمیت و پرکاربرد در بینایی ماشین میباشد؛ تا آنجا که هرگونه اندازهگیری با استفاده از دوربین مستلزم بکارگیری روشهای پردازش تصویر دقیق برای تخمین فاصله (یا عمق) نقاط شاخص میباشد. از طرفی، عمقسنجی و سرعتسنجی دو مقوله بسیار نزدیک به هم میباشند تا آنجا که در بسیاری از موارد، ارائه پاسخ برای یکی منجر به حل مساله دیگر میشود.
اولین و مهمترین نیاز در یک سیستم عمقسنجی/سرعتسنجی برپایه بینایی ماشین، داشتن اطلاعات کالیبراسیون دوربین میباشد. در حقیقت، مهمترین شاخص برای اندازهگیری فاصله/سرعت داشتن پارامترهای ذاتی دوربین شامل فاصله کانونی، ابعاد CCD، فاصله دوربینها از یکدیگر (تنها در بینایی دو یا چند دوربینی) و مدل اعوجاجات لنز میباشد. تاکنون روشهای متعددی برای محاسبه پارامترهای فوق و کالیبراسیون دوربین ارائه شده است. باید توجه داشت که اگر لنز از نوع زوم (مثلا با فاصله کانونی بالاتر از 50 میلیمتر) باشد، میتوان لنز را ایدهآل و بدون اعوجاج فرض نمود. زیرا در این حالت، تنها از ناحیه مرکزی لنز برای تشکیل تصویر استفاده میشود.
با وجود این، اطلاعات کالیبراسیون به تنهایی برای عمقسنجی/سرعتسنجی کافی نمیباشد. زیرا، با داشتن ابعاد CCD میتوان اندازه واقعی تصویر (l) بر روی سنسور را محاسبه نمود. بعلاوه، فاصله کانونی (f) بیانگر فاصله تصویر از کانون لنز میباشد، لذا مطابق شکل زیر، با فرض موازی بودن هدف با سنسور تصویربرداری، میتوان یک رابطه تشابه بین مثلثهای تصویر و هدف نوشت: L/D=l/f که L اندازه واقعی هدف و D فاصله مرکز لنز تا هدف است.
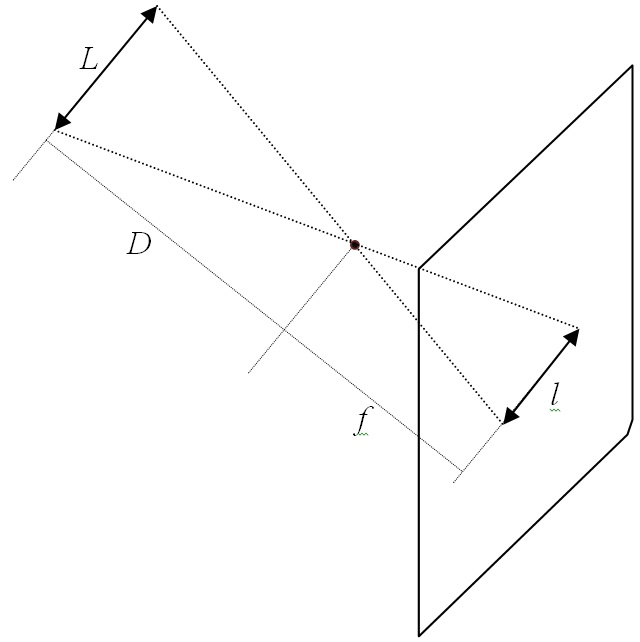
به این ترتیب، یک معادله با دو مجهول L و D (به ترتیب، طول هدف و فاصله مرکز اپتیکی دوربین تا آن) بدست میآید. حل معادله فوق، نیازمند استفاده از اطلاعات کمکی، جدای از سیستم تصویربرداری میباشد.
شاید بتوان کلیه روشهایی که تاکنون محققین برای حل معادله (3) ارائه دادهاند را به چهار دسته کلی تقسیم نمود: 1) دو/چند بینایی، 2) نگاشت صفحه به تصویر، 3) استفاده از شاخصهای محیطی و 4) روش رشد ناحیه. برای مطالعه بیشتر در اینباره به مقاله روشهای فاصلهسنجی ویدیویی مراجعه کنید. از بین روش های فوق، تنها روش دو/چند بینایی (استفاده از دو یا چند دوربین به صورت همزمان) وابسته به اطلاعات صحنه نمی باشد.
بینا فاصله سنج
ایده ما فاصله سنجی تنها با استفاده از یک دوربین و بدون استفاده از اطلاعات صحنه می باشد. خواسته ای که در ابتدا غیرممکن به نظر می رسد. اما مشاهدات ما نشان داد که تحت شرایطی می توان مساله فوق را حل نمود. ما برای این منظور یک فیلتر تطبیقی بهینه طراحی و پیاده سازی نمودیم. فیلتر مذکور براساس تغییرات عرض هد در تصویر قادر به تخمین فاصله دوربین تا هدف می باشد.
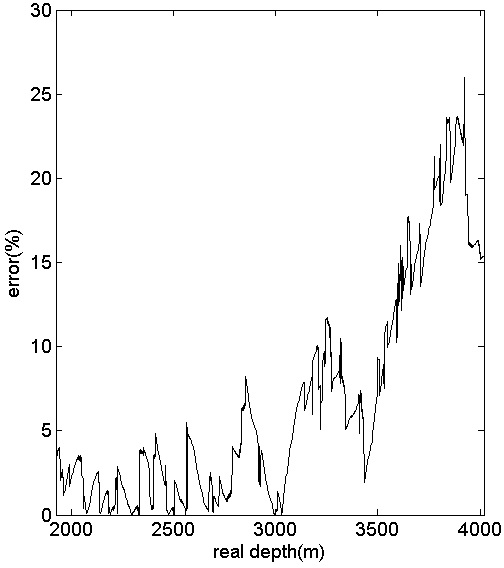
عملکرد سامانه پیشنهادی با استفاده از یک دوربین مادون قرمز برای فاصله سنجی تا یک قایق موتوردار نسبتا کوچک مورد ارزیابی قرار گرفته است. نتایج عملکرد قابل قبول سامانه پیشنهادی برای فاصله سنجی تا قایق با خطای کمتر از 4% بوده است. این محصول هم اکنون در مرحله نمونه سازی می باشد.
مطالعه بیشتر
برای مطالعه بیشتر، (مقاله های) را زیر مشاهده نمایید:
– » روشهای فاصلهسنجی ویدیویی
همچنین، محصولات زیر با بینافاصله سنج مرتبط هستند: